



Software · Robot Learning Division
ETH Robotics Club · ETH Hangar, Dübendorf · Freelance/Part‑time
Sep 2025 – Jun 2026
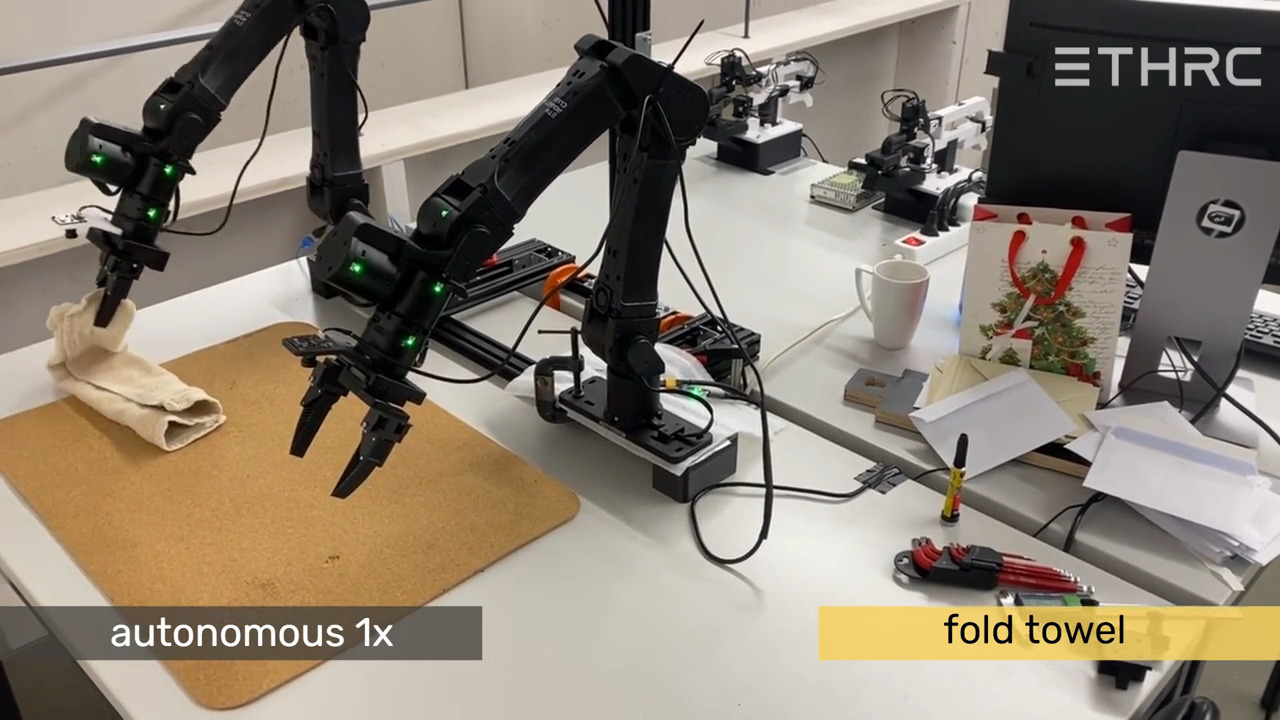
- Self-collision detection for bimanual manipulators
- Inverse dynamics control replacing inverse kinematics control
- Imitation-learning policies for towel folding