Employer project
Swiss Robotics & Advanced Technologies AG
Junior Robotics Engineer (Mar–Aug 2024) · Robotics Engineer part-time (Sep 2024 – Jun 2026)
Fully actuated UAV · Asset inspection
Confined-Space Inspection Drone
2024–2026 · Winterthur, Switzerland

Front-view prototype render of the fully actuated inspection UAV with protective cage and modular payload bay.

Side view showing the 10-actuator layout, propulsion geometry.

Drone during vertical-flight configuration render.
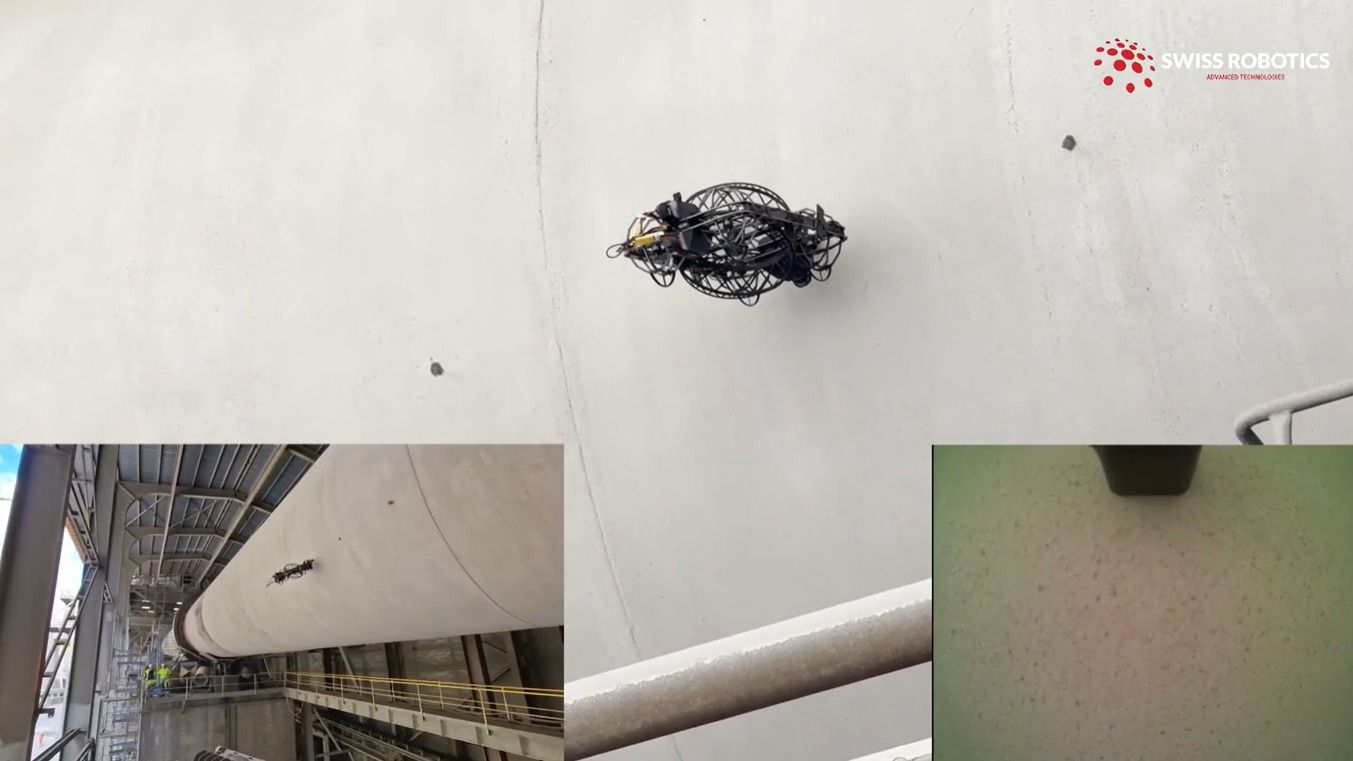
Real operation inside an industrial plant: the drone inspecting an asset surface, with the onboard camera feed shown alongside.
What I worked on
Core engineering on the inspection drone prototype: helping design and test a platform built to fly in constrained industrial environments, carry modular non-destructive testing (NDT) payloads, and give operators reliable video and telemetry from the asset surface.
- Design, development, and testing of the inspection drone prototype
- Implemented and tuned control algorithms on the fully actuated airframe
- Built simulation tooling to bridge our control stack with NVIDIA Isaac Sim / Omniverse
- Contributed to the next hardware iteration with design insights from testing
- Collected field data and evaluated electronic components
- C++ flight-stack integration on the vehicle; multiple sensing payloads on one platform
- Flutter remote controller with low-latency GStreamer video, LiDAR, and sensing visualization