LiDAR odometry · Power & sensing stack
LiDAR SLAM Upgrade
2024 · Post-thesis
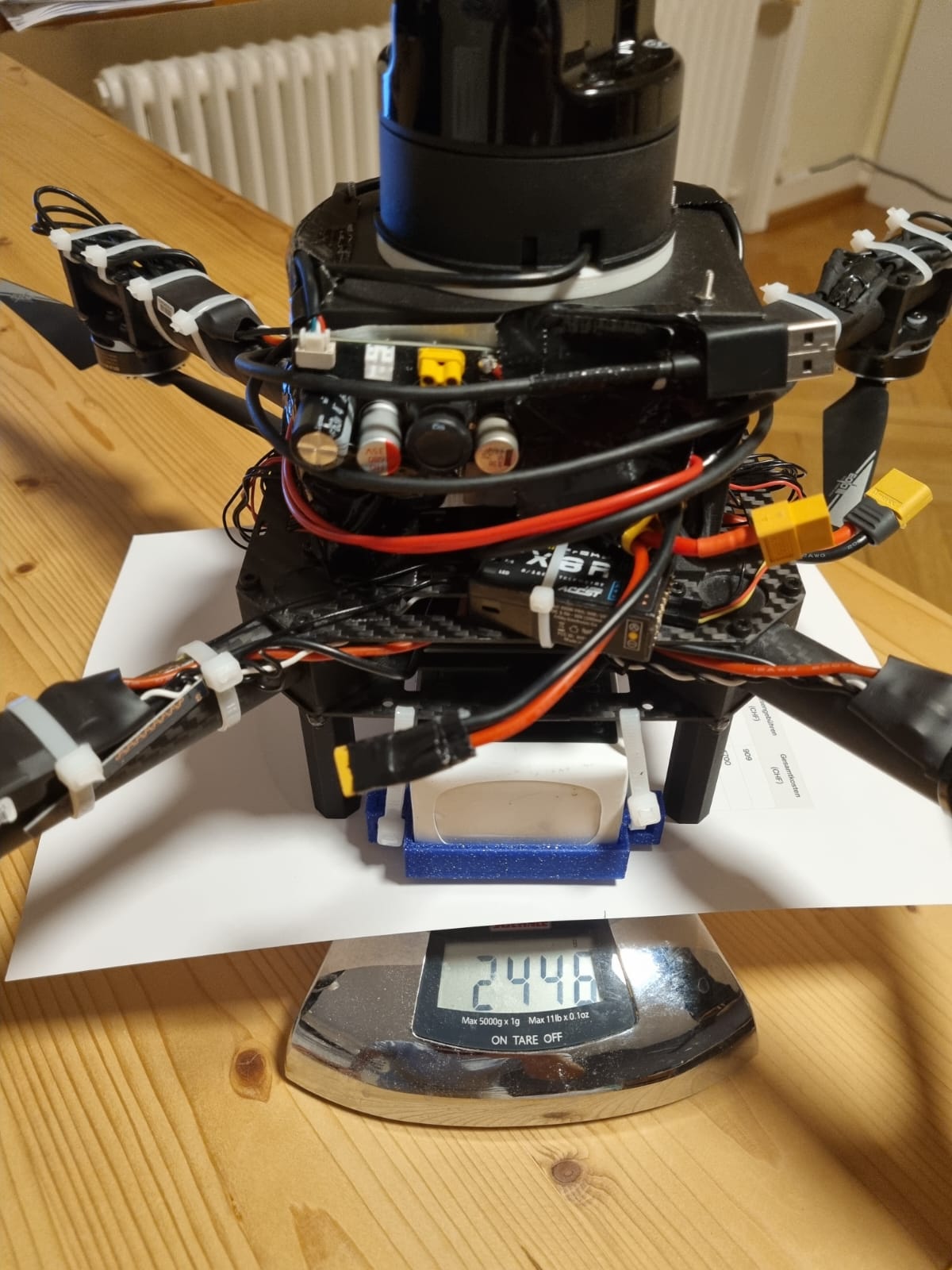
Everything on one frame: the Unitree L1, Jetson companion computer, custom power PCB, and the original Pixhawk stack. Weighed at ~2.45 kg despite the addition of the heavy LiDAR it only weighs 20g more than the original thesis version. This is thanks to weight cuts on the frame (removing folding joints for arms, removing landing gear, 3D Printing more weight efficient parts.).
Indoor hop with the upgraded perception and power stack—first stable indoor flight with LiDAR odometry.
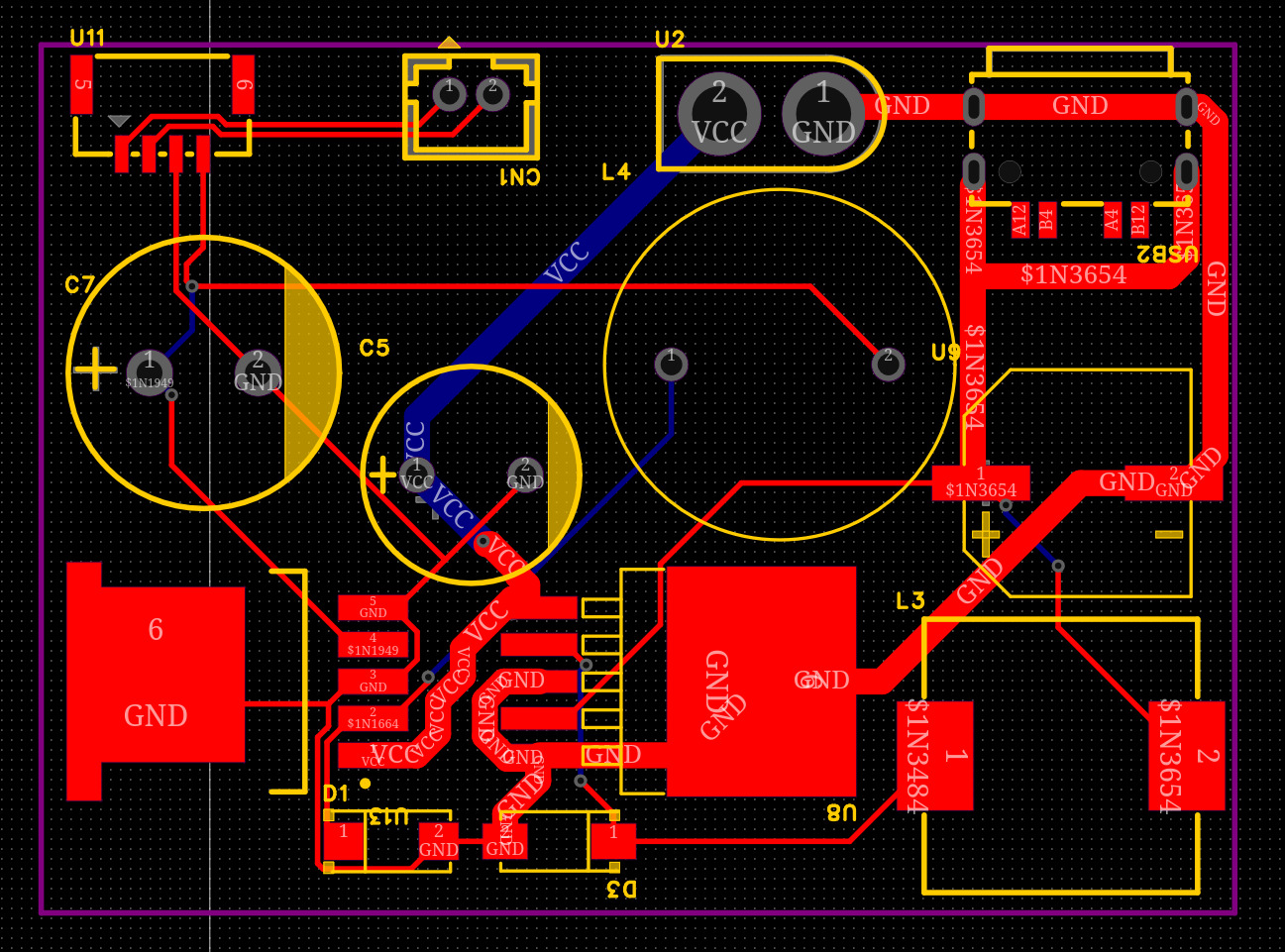
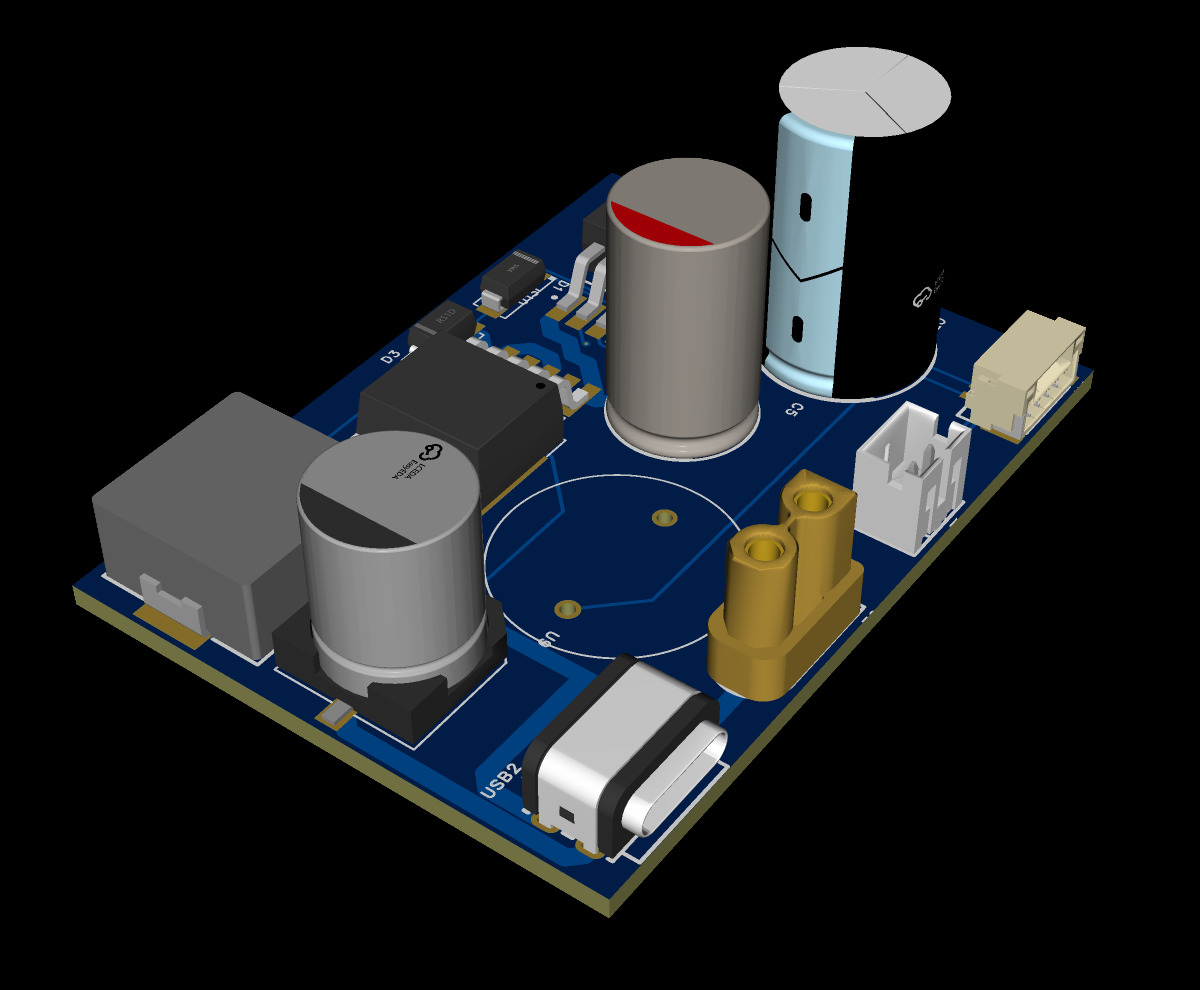
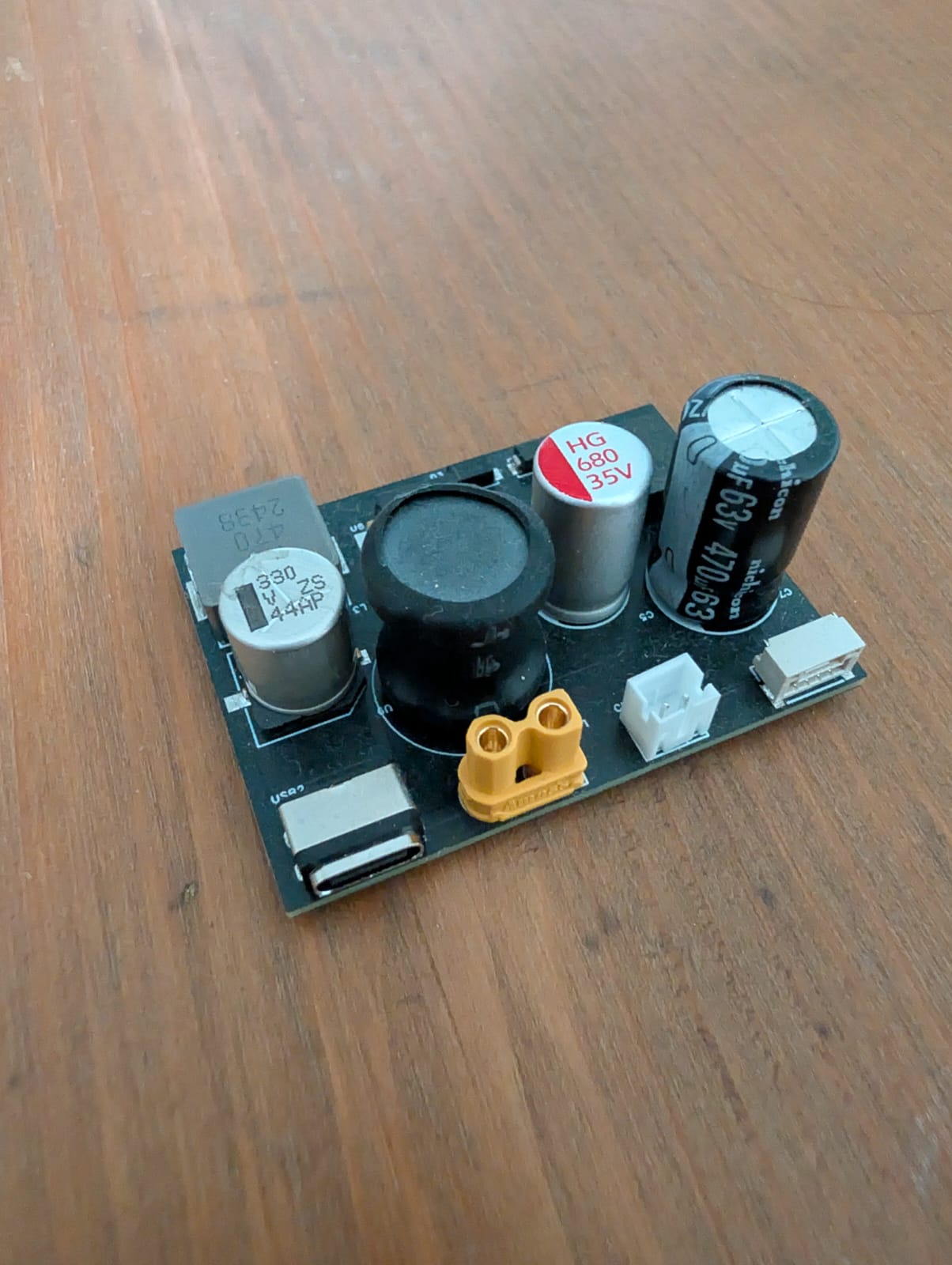
Layout in the EDA tool: separate rails for Jetson and LiDAR peripherals, thick traces to handle full 3A for jetson USB-C port

Opened after the sensor broke was curious how the spinning parts looked like and why causes such high vibration. Unitree sent a free warranty replacement :)

I tried prop guards, but they resonated with the LiDAR vibration frequency. I also inverted the props to face downward: a significant free efficiency gain.
SLAM
I adapted FAST-LIO to work with the Unitree L1 LiDAR, and also tried Unitree’s Point-LIO adaptation for the L1. FAST-LIO had fewer moments where the estimate completely drifted, but Point-LIO required much less compute.
LiDAR rotor balancing
The L1’s spinning mass was badly unbalanced—the vibration didn’t just distort scans, it made the entire drone unstable in flight. I added a 3D-printed counterweight on the rotor to correct the imbalance.

Blue 3D-printed counterweight on the L1 rotor, mounted on a TPU pad.